 EN
EN
 AR
AR
 BG
BG
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 ID
ID
 LV
LV
 SR
SR
 SK
SK
 SL
SL
 UK
UK
 VI
VI
 SQ
SQ
 ET
ET
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 GA
GA
 BE
BE
 AZ
AZ
 KA
KA
 LA
LA
 UZ
UZ
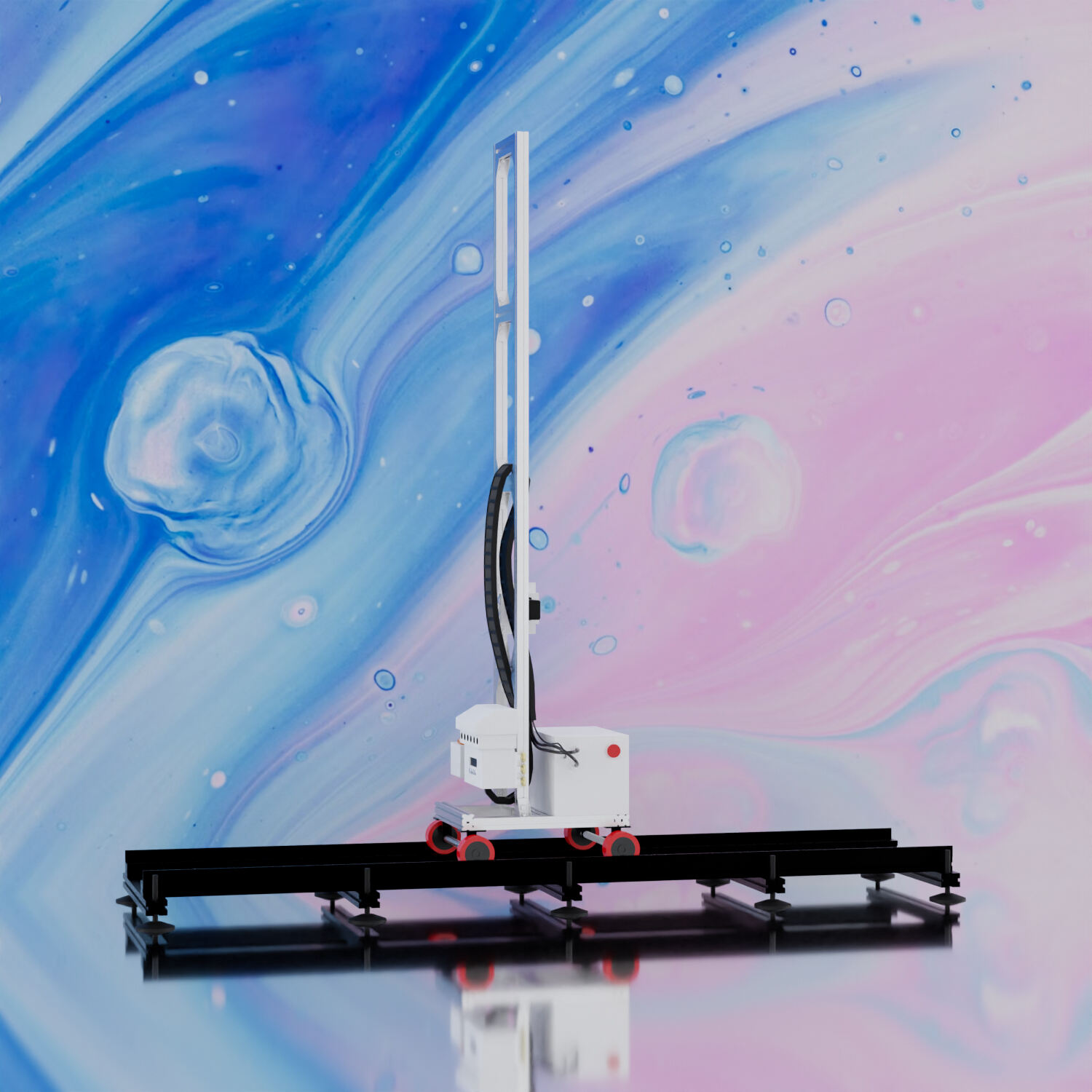
Imprimentes muralium parietum sunt categoria instrumentorum automatorum ad imprimendum directe imagines in parietes vel substrata verticalia. Potentia eorum principalis profecta est ex stabili systemate viae directionis et ex systemate controlis motus concertato, quae simul determinant praecisionem impressionis, applicationes, et efficaciam. Hic liber analysat structuram viae directionis, mechanismos positionis, et strategias controlis motus.
1. Structura Viae Directionis et Caracteristicae Materialis
Systema ruderis directivae imprimae parietalis incaricatum est de motu stabili capitis imprimendi et corporis machinae. Caracteres structurales eius communes includunt:
Materiales Ruderis Directivae
Extrusio alliminii: levis, portabilis, riguitas moderata, apta pro machinis portabilibus.
Materiales ferri: alta riguitas et resistentia abrasionis, late utita in modellis industrialibus alti praecisionis.
Coniunctio et Extensio Ruderis Directivae
Segmenta modularia adiiciuntur ad longitudinem iuxta latitudinem imprimendi adaptandam.
Clavos positionantes, sulcos caudae columbarum, vel structuras firmationis speciales ut precissio coniunctionis conservetur.
Methodi Installationis et Adaptatio Parietis
Rudera montata in solo cum cuneis aut brachiis supportantibus ad solos inaequales accommodandos.
Structurae absque ruderibus, usura succi vel supportum parietalium, ut dependentia a conditionibus ambientis minuatur.
Adaptatio parietis includit calibratum verticale, calibratum horizontale et adjustmentes planities superficielis.
Rectitudo, riguitas et praecisio assemblagii ruderum directe afficiunt stabilitatem trajectus capitis imprimentis.
2. Methodi Positionandi et Mechanismi Praecisionis Tuendi
Systema positionis confirmat ut caput imprimentis pingamentum accurate in coordinatis specificatis super parietem locet. Hoc praecipue includit positionem mechanicam et positionem sensoribus innixam.
Positio Meccanica
Terminales cursus ad protectionem campi motus et effugandam excessionem usantur.
Signa reference assemblagii ad adaptationem durante extensione ruderum usantur.
Sensor et Positio per Reactionem
Sensores limitis photoelectrici ad reparationem originis et protectionem puncti extremi usantur.
Sensores Hall effect non contactantes detegitionem limitis praebent cum longiore vita operativa.
Encoderes motum verum motoris detegunt, inter quos:
Incrementales encoderes: structura simplex, pretium humile.
Absoluti encoderes: informationem positionis servat cum potestas abest, aptus ad applicationes altissimae praecisionis.
Compensatio Irregularitatis Superficielis Parietis
Parietes non sunt plana ideales et possunt gibbos vel inclinationes continere. Itaque, quaedam instrumenta praedita sunt:
Modulis distantiarum laser ad mensurandam distantiam inter caput impressorium et parietem
Compensatione altitudinis axis Z per software
Algorithmis distortionis geometricae ad errores scalae imaginis minuendos
Coniunctione mensurationis ex machina cum compensatione ex softwere, irregularitates superficiei efficaciter minui possunt.
3. Methodi Controlis Motus et Compositio Systematis
Systema regolatiōnis motūs gestit trāiectōriam capitis imprimmendī, cōnsortiōnem velocitātis et synchronizātiōnem īniciendī īncae. Est pars perbāsica impressōrum parietis longī.
Mēthodī Movendī
Agere per motorem passum ad modēlōs fōrmās mediocriter exactōs ūsu moderātō.
Agere per motorem servōrem ad ūsus altius exactōs, velōcissimōs et clausōs.
Structūra Axis Movendī
Configurātiōnēs commūnēs includunt duōs aut trēs axes:
Axis X ad movēndum hōrizontāliter
Axis Y ad movēndum verticāliter
Axis Z ad rēgulandam distantiam (in quibusdam modēlīs praesentem)
Compositio systematis
Systema typicum regolandī motūs continet:
Controller motus aut tabula imperialis incorporata
Agitatores motorum (graduales aut servo)
Componentes executionis motoris
Finitorum interruptores et encoderes pro informatione renitente
Unitas imperii capitis impressoris pro gestione emissionis tincturae
Planificatio trajectoriae et synchronizatio
Systema imperii efficit planificationem itineris motus et synchronizat emissionem tincturae, ut velocitas et frequentia tincturae congruant, vitantes itaque lineas desideratas, phantasma vel zonarum apparitionem.
Planificatio trajectoriae saepe includit scandentem rasterem pro imagine imprimenda et vias vectoriales pro lineis et scripto.
4. Factores qui Motum et Positionis Performantiam Afficiunt
Performantia generalis impressoris parietalis afficitur a pluribus factoribus, inter quos:
Rectitudo et riguitas viae directionis
Praecisio motus motoris et capacitas oneris
Resolutio codicilli et qualitas responsi
Algorithmi accelerationis et retardationis systematis regulandi
Capacitas mensurae parietis et compensationis imaginis
Ludentia mechanica et tolerantiae coniunctionis
Haec factorum influunt in errores impressionis, repetibilitatem, stabilitatem motus et qualitatem imaginis finalis.
Methodi positionandi et regendi motus rotorii impressoriarum parietis determinant praecisionem, stabilitatem et aptitudinem durante operatione actuaria. Characteres technici eorum sequentibus summarier possunt:
Structura viae directionis afficit stabilitatem motus et ambientem applicationis.
Systemata positionandi servant accurritudinem coordinatarum capitis imprimendi et fines motus.
Systemata regulae motus trajectoriam disponunt et synchronizationem tincturae tractant.
Software correctivum et circuitus reversionis qualitatem impressionis generalem meliorent.
Futuri developmentis tendentiae se fortasse in positionem visualem absque rudentibus, regulam viarum alti gradus libertatis, gestionem colorum per AI et calibratio automatica parietum conferent, ad intelligentiam et adaptationem augendam.
